DC7 Complex Constitutive modelling for immersed shell discretizations:
Immersed Isogeometric Analysis for structural dynamics applications.
Introduction and Motivation
Isogeometric analysis (IGA) is able to provide numerous advantages compared to conventional Finite Element Analysis (FEA). IGA introduced originally as an idea of integrating Computer Aided Design (CAD) and FEA, providing efficiency by eliminating the meshing and re-meshing processes. Another strong motivation in its initial conception was the reduction or elimination of errors due to geometric approximation. The effect of higher-order inter-element continuity due to the smoothness of its spline based basis functions, leads to improved spectral accuracy over classical finite elements analysis. For this reasons IGA has been established as a strong high-order competitor in the field of structural dynamics [1].
The maximum discrete eigenfrequency is a value dictating the critical time-step ensuring stability in hyperbolic problems with explicit time integration. In standard finite elements having only the possibility of C 0 continuity, using higher-order discretizations will result in high maximum discrete eigenfrequencies (both in the conforming and immersed setting). This will lead to tiny time steps and infeasible simulation times. Immersed IGA allows for the analysis of complex geometries without the need for conforming meshes, simplifying the meshing process. Employing immersed IGA and a Lumped Mass Matrix demonstrated promising results restricting the largest discrete eigenfrequency, as presented originally in [2]. Thus, with this configuration the time step size is practically independent of the presence of small cut elements, making immersed methods an attractive alternative for explicit dynamics simulations.
Inspired by this observation, the studies conducted in [3] show that although this statement is valid, allowing the use of larger time steps, the lumping of the mass presents significant disadvantages in terms accuracy, especially in the immersed setting.
These studies conducted on simple example problems, in particular for the case of a bar with free-free boundary conditions. The physical domain of a bar is immersed in an extended domain where the parameter ζ is dictating the size of the fictitious domain on each side, and for ζ = 0 the boundary fitted scenario applies.
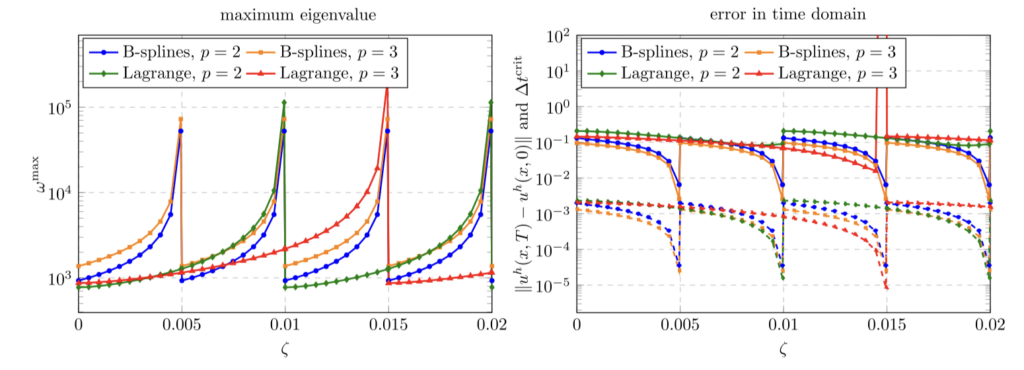
In Figures 1 and 2 we can observe the compromise between efficiency and accuracy for IGA as stated in [3]. On the one hand, consistent mass matrix provides better accuracy but smaller time steps and, on the other hand, lumped mass matrix, being able to bound the max eigenfrequency independently of the cut element size (parameter z), is providing larger time steps (dashed line), but with an accuracy being at least an order of magnitude less.

In conclusion, mass lumping in combination with immersed IGA has some interesting advantages, although seems like this topic is not fully understood at the moment, with room for improving the established workflows. Additionally, some interesting research directions would be towards an improved mass lumping technique, as well as introducing adaptive refinement, resulting in a better alternative for the efficiency-accuracy dilemma.
Research progress
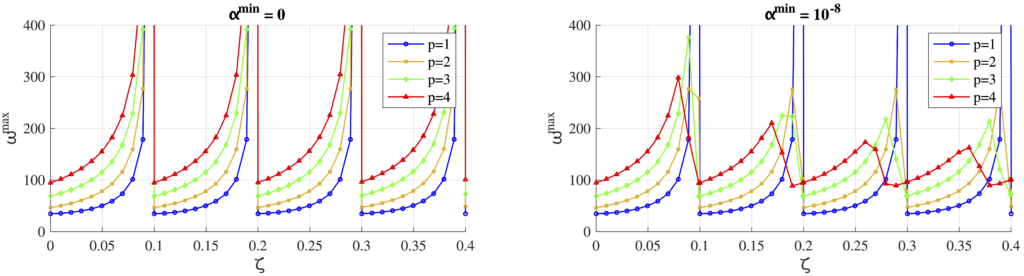
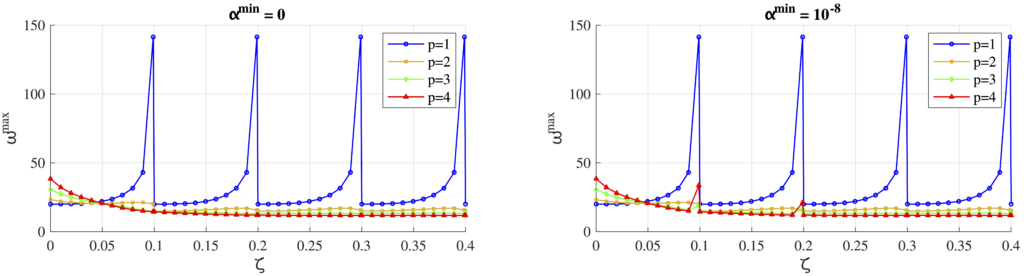
The initial scope of this work is to extend the studies performed in [3] to more complicated problem scenarios and soon including also a Kirchhoff-Love shell, where IGA has demonstrated its success. With that in mind, the first step was the extension to Bernoulli-Euler beams, since they are the first step towards shells, and it was the simplest way to see the possible behavior changes moving from 2 nd to 4 th order PDEs (see Fig. 3 and Fig. 4).
In brief, we can comment that the extension of these results to the Bernoulli-Euler beam problem demonstrates a similar behavior compared to the bar with some minor differences.
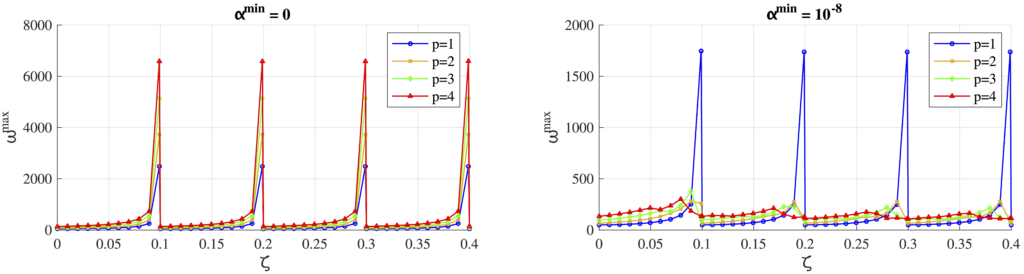
The next steps were the extension to two-dimensional problems, namely the equivalent of the bar, which is the membrane, and of the Bernoulli-Euler beam, which is the Kirchhoff plate.
As we can see, the 2D results (Fig. 5) as expected, follow the same trend as the equivalent 1D results. Most of the obtained results are not herein presented for the sake of brevity but, as a general comment, we can state that they all mimic the equivalent 1D results. In addition, the transition from consistent to lumped mass matrices results in the bounding of the maximum eigenfrequency, in a similar way as in 1D.
References
[1] J. Cottrell, A. Reali, Y. Bazilevs, and T. Hughes, “Isogeometric analysis of structural vibrations,” Computer Methods in Applied Mechanics and Engineering, vol. 195, no. 41, pp. 5257–5296, 2006.
[2] L. Leidinger, “Explicit isogeometric b-rep analysis for nonlinear dynamic crash simulations: Integrating design and analysis by means of trimmed multi-patch shell structures,” Ph.D. dissertation, Technische Universitat Munchen, 2020.
[3] L. Radtke, M. Torre, T. J. Hughes, A. Duster, G. Sangalli, and A. Reali, “An analysis of high order fem and iga for explicit dynamics: Mass lumping and immersed boundaries,” International Journal for Numerical Methods in Engineering, vol. 125, no. 16, p. e7499, 2024.
Leave a Reply
Want to join the discussion?Feel free to contribute!